MAPLE: MIT Autonomous Pathfinding for Lunar Exploration
MAPLE (Oct 2024 – May 2025)
MIT Autonomous Pathfinding for Lunar Exploration
Second Place: NASA Lunar Autonomy Challenge 2024 – 2025 (nasa.gov)
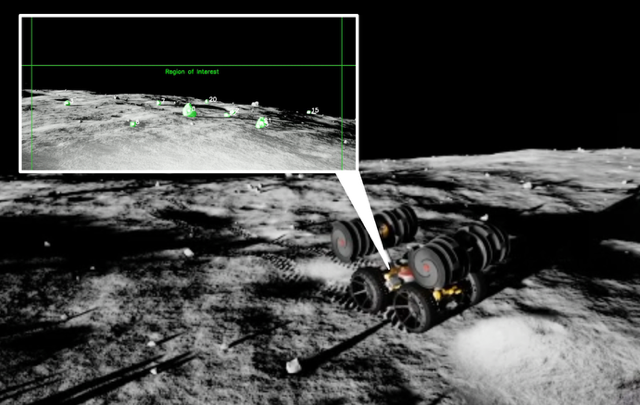
Challenge: Virtually map and explore the lunar surface using a digital twin of NASA’s ISRU Pilot Excavator (IPEx) (nasa.gov)
Approach: a real-time, CPU-only pipeline combining zero-shot boulder segmentation (FastSAM) with graph-theoretic data association for drift-free global localization
Outputs: Sub-centimeter localization accuracy across multi-session traverses; publicly released datasets and a simulation playback module
Announcement: NASA names winners of the Lunar Autonomy Challenge (nasa.gov)
Overview
MAPLE delivers a robust, drift-free localization system for autonomous lunar rovers that replaces GNSS-based methods with purely vision-based cues. By extracting boulder landmarks via zero-shot instance segmentation and aligning them to a prior map through graph-theoretic matching, MAPLE achieves sub-centimeter pose accuracy in real time—crucial for precision tasks like excavation and infrastructure deployment under Artemis.
Key Technologies
FastSAM Segmentation: Zero-shot instance segmentation of lunar boulders to generate reliable landmarks
Graph-Theoretic Association: Constructing and matching a landmark graph for drift-free, multi-session global localization
Real-Time CPU Pipeline: Efficient implementation enabling on-board deployment without specialized hardware

Leadership & Team
MAPLE was led by MIT Ph.D. candidate Annika Thomas, with faculty advising from Dr. George Lordos and Prof. Jonathan P. How. The core team comprised MIT graduate and undergraduate students Robaire Galliath, Aleksander Garbuz, Luke Anger, Cormac O’Neill, Trevor Johst, and Dami Thomas. The team was made up mostly of undergraduate students, almost all new to perception and robotics research. In team lead Annika Thomas's words, "we came together from different backgrounds, learning new tools and approaches along the way. It was a fast-paced team effort that reflected both the challenges and excitement of building something complex from the ground up.”